
g2o的本质:g2o是一个算法集的C++实现,而并不是在算法理论上的创新,即根据前人求解非线性最小二乘的理论,根据具体的问题,选用最合适的算法。
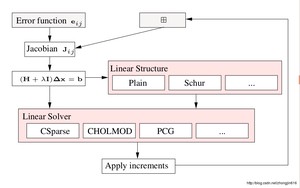
它是一个平台,你可以加入你自己的线性方程求解器,编写自己的优化目标函数,确定更新的方式。g2o的作者说Guassian-Newton和Levenberg-Marquardt方法比较naive,但是g2o的本质就是这些算法的实现。事实上,g2o iSAM SPA和 sSPA等非线性优化算法只是在非线性问题线性化时处理得不一样,在线性化后要求解线性方程都是利用了已有的linear solver库来求解,如 CSparse CHOLMOD PCG等,他们都需要依靠Eigen这个线性代数库。
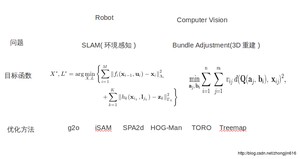
g2o的用途:很多机器人的应用如SLAM(同步定位与制图)还有计算机视觉中的光束优化(bundle adjustment 参考http://blog.csdn.net/abcjennifer/article/details/;
http://courses.cs.washington.edu/courses/cse576/05sp/projects/proj3/artifacts/yongjoon/index.html)都会涉及到最小化非线性误差函数的问题。这类应用中,非线性误差函数可以用图(graph)的形式来表征。整个问题的求解就是要找到最符合观测量的相机参数或机器人状态。
g2o的实现:
类似算法:iSAM (参考http://openslam.org/iSAM.html)
SPA2d (参考http://users.ics.forth.gr/~lourakis/sba/)
HOG_Man
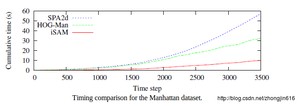
g2o与其他算法的效果对比:(具体参考论文:《g2o:a general graph optimization》)
Fig1: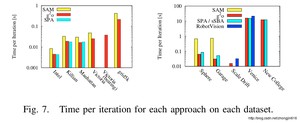
Fig2: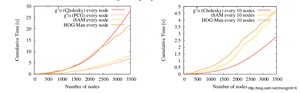
Fig3:isam与其他算法的对比(参考:http://people.csail.mit.edu/kaess/isam/comparison.html)
版权声明:
本文来源网络,所有图片文章版权属于原作者,如有侵权,联系删除。
本文网址:https://www.mushiming.com/mjsbk/13601.html