
原文链接:はじめてのXCP
测量/校准协议XCP入门
第二章、XCP协议的通信的构造和功能
接下来,将会说明“通用校准协议(XCP:Universal Calibration Protocol)”协议具体是如何通信的,以及XCP的功能和协议内容。
主从方式
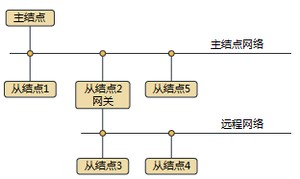
在XCP中,测量/校准的工具侧是“XCP主结点”,被测量的ECU侧是“XCP从结点”,采用所谓的“主从通信方式”。这种通信方式中,必定是从主结点发送命令来开始,从结点在接收到后,再向主结点发送应答,以这样的顺序进行通信。如图7所示,1个网络上主结点必定只有一个,而从结点可以有多个。
网络和传输方式
在网络上,只要能区分“从主结点发送到从结点”和“从从结点发送到主结点”,这两种类型的通信,就能够使用XCP。在“XCP on CAN”的情况下,是通过用两个CAN ID,“从主结点发送到从结点的ID”和“从结点发送到主结点的ID”进行区分。在网络上使用区分的通信并传输一些内容时,XCP使用了三种传输模式(图9)。
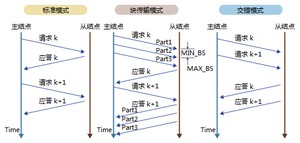
对于传输模式而言,可以在主结点侧和从结点侧,分别决定使用哪种模式。例如,主结点为“块传输模式”,从结点为“标准模式”,这样的使用方式也是可行的。因此,尽管主结点的工具侧的性能强大,但是当从结点的ECU只能使用有限的资源时,也可以实现简化的传输模式。
CTO/DTO
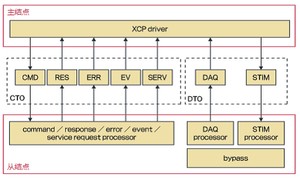
在XCP中,除了主结点和从结点之间的传输方向的差异之外,要传输的内容还被分为“与XCP本身的控制相关的通信”和“与数据相关的通信”两种类型,以及定义在每个网络上传输的报文的格式。作为对比,前者被称为“命令传送对象(CTO:Command Transfer Object)”,后者被称为“数据传送对象(DTO:Data Transfer Object)”。
CTO:Command Transfer Object的缩写
CTO是与XCP自身的控制命令和应答等相关的对象。控制命令从主结点发送,对命令的应答是从从结点发送。
DTO:Data Transfer Object的缩写
DTO是与同步从结点(ECU)获取数据测量结果以及进行数据变更相关联的对象。同步数据变更被称为“激励(Stimulation)”,但由于是测量/校准以外的功能,因此省略详细说明(详情请参照XCP标准文件)。
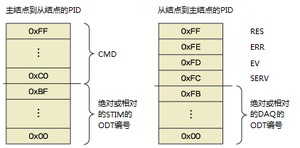
图10展示了,从XCP标准文件的“Part2 1.1.1 The XCP Packet Types”章节中,抽取的XCP主结点与从结点之间的CTO和DTO的关系。
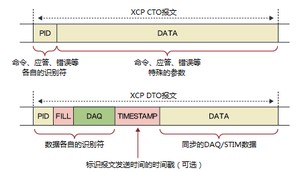
报文格式和PID
如上所述,CTO和DTO是不同报文格式(图11),可以分别设置主从设备的最大报文长度。
MAX_CTO:CTO的最大报文长度(字节)
MAX_DTO:DTO的最大报文长度(字节)
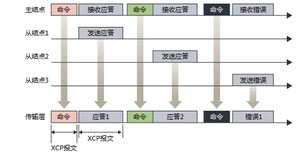
除了测量/校准的同步数据交换之外,所有其它的都是通过主结点发送命令,从结点将返回肯定应答来完成的。在此,以XCP on CAN为例来说明,其中主结点发送到从结点的CAN ID是“1”,从结点发送到主结点的CAN ID是“2”。在这种情况下,XCP通信按以下顺序执行。
- 主结点发送的CAN ID为“1”,其中第一个字节指定为“0xFF”,第二个字节指定为“命令参数”。
- 从结点接收第1行的连接命令,并通过PID识别该命令。
- 从结点发送的CAN ID为“2”,其中第一个字节指定为“0xFF”,第二个字节开始指定为“应答值”。
- 主结点接收第3行的应答命令。
图13显示了实际通信的跟踪结果。第1行的“0xFF”是命令“CONNECT”,从而在主结点和从结点之间建立逻辑连接,并接收后续命令。

访问测量/校准对象
XCP的测量/校准,是通过对ECU内部的软件的访问来实现的。具体而言,针对要测量/校准的对象的内存区间,通过指定对应的“XCP地址”的方式进行访问。
异步测量
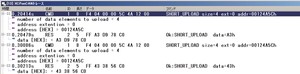
XCP除了同步测量,还可以做异步测量。异步测量是使用主结点发送的命令,通过指定的XCP地址来提取从结点的ECU内部的数据,并通过从结点的应答将该数据传送给主结点,如此循环往复来实现的。为了取出数据,使用PID为“0xF4”的命令“SHORT_UPLOAD”。这个命令和应答的格式如下所述。
SHORT_UPLOAD命令:
CTO 0字节位置,指定为PID“0xF4”
CTO 1字节位置,指定为取出字节数。最大为MAX_CTO – 1字节
CTO 2字节位置,保留字段
CTO 3字节位置,指定为要读出的8位扩展地址
CTO 4~7字节位置,指定为要读出的32位地址
SHORT_UPLOAD应答:
图14是主结点使用“SHORT_UPLOAD”,在XCP扩展地址为“0”、XCP地址为“0x00124A5C”的位置,每100ms取出4字节的过程的跟踪结果。
同步测量
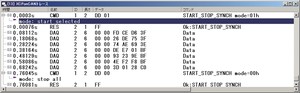
主结点在进行同步测量之前,通过命令指定要取出的数据的XCP地址,从结点在等到同步测量开始命令后,使用DTO发送到主结点。因此,在同步测量的情况下,不是通过命令和应答的组合,而是通过测量周期或事件,由从结点发送DTO报文到主结点。
图15展示了,由“START_STOP_SYNCH”命令开始的测量同步,从结点持续地将测量数据通过DTO报文发出,直到收到“START_STOP_SYNCH”命令才停止的实际的跟踪结果。
以下是对同期测量中,对ECU的控制应用程序的测量时机,主结点和从结点的任务分割的说明。
ECU的控制应用程序:
当到达测量的控制周期,或者事件发生时,进行处理并通知到XCP从结点。
主结点:
确定要同步测量的内存及其测量周期,指定同步测量的XCP地址,并使用命令启动和停止同步测量。
从结点:
它管理从主结点指定的同步测量的XCP地址。然后,从检测的开始同步测量后,直到停止之前,会根据上述ECU的控制应用程序传达的被管理的XCP地址,从取出内存值并发送DTO报文。
XCP与同步测量相关的术语和概念
关于同步测量,在XCP标准文档中使用了各种术语。这里我们解释一下主要的术语和概念。
元素(Element):
通过XCP地址来指定的一个测量对象的内存。
对象描述表(ODT:Object Description Table):
归并元素的测量内存,在一个DTO报文中聚集最多的可发送的内存的表。
ODT条目(Entry):
为创建ODT的元素的测量对象的XCP地址。
DAQ列表(List):
这是一个ODT的集合。这决定了在一个同步测量的周期或者事件触发时要测量的内存数量。ODT与一个DTO报文相关联,由MAX_DTO - PID决定了最大的大小,但由于实际测量的内存可能会大于此值,因此分为了ODT和DAQ列表。
事件通道(Event Channel):
在同步测量的控制周期和事件触发的通道,也即是“种类”的意思。同步测量的时序都是基于这个事件通道的。
同步测量的处理
下面将说明,在同步测量中,ECU的控制应用程序向从结点发送测量的时机,将执行怎样的处理。
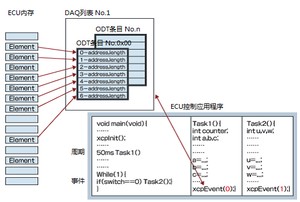
(1)控制应用程序要通知从结点测量时机。这个通知通常是将事件通道作为参数,来调用从结点的驱动过程来实现的。
(2)针对主结点以ODT条目来指定的测量对象的内存地址,从结点使用缓冲区来管理,在每次被控制应用程序调用时,都会根据该缓冲区来读取指定地址的内存。
(3)读取的内存以ODT为单位合并,并以DAQ列表来生成DTO报文。
图16展示了,元素和ODT条目、DAQ列表和ECU控制应用程序之间的关系。当ECU的控制应用程序集成了Vector的从结点驱动程序后,调用C语言函数“XcpEvent(事件通道)”,就会根据ODT条目的缓冲区,从ECU内存中读出元素的值来创建出DTO报文。
测量对象和DTO报文
图17展示了,作为测量对象的元素从在ECU内存,到在网络上传输的DTO报文之间的关系。
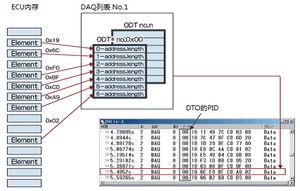
在图17中,是根据ODT条目测量的七个元素的结果,取出的“0x19”“0x6C”“0xF0”“0xBF”“0xC0”“0xA9”“0x02”,作为一个ODT的DTO报文就创建好了。在这个DTO报文中,PID包含在第一个字节,测量时元素的内容被包括从第二个开始的字节中。像这样的,PID的值是从“0”到“0xFB”的DTO报文被称为“DAQ”。
同步测量的选项
除了上面描述的那些之外,根据测量的规模和用途,还有XCP同步测量的各种使用形式。下面将介绍这些使用形式中比较典型的例子。
动态DAQ:
通过增加管理测量目标的DAQ列表中的ODT及其条目的数量,可以增加测量的测量点的数量。而且通过维持与要测量的事件通道数量一样多的DAQ列表,可以对ECU的所有测量时机进行测量。但是这些数量的增加会增大ECU中的管理缓冲区,因此会消耗ECU的内存。
而且如果ECU具有10ms和25ms的控制周期,有的10ms的控制周期中测量的测量点的数量很大,别的25ms的控制周期中测量的测量点的数量也很大,根据测量的场景不同,测量点的数量会有不同。对于这样的应用程序,有一种称为“动态DAQ”的功能,可以允许从结点动态更改每次测量的DAQ列表、ODT和ODT条目的数量。相反的,如果在集成XCP驱动程序时,这些数量是预先确定的,则称为“静态DAQ”。一个从结点将具有静态或动态DAQ功能。
带时间戳的DAQ:
在主从结点间的通信中,如果因为加入网关而造成时间差,又或者因为使用无线通信,使得通信时间出现波动的情况下,同步测量中的测量时间对于主结点来说是“不确定”的。为了防止这种情况,要使用“带时间戳的DAQ”。在从结点侧,包含测量时间的时间戳的DAQ,通过DTO报文传送给主结点。而收到这个报文的主结点,可以读出所添加的时间戳来知道正确的测量时间。
校准
校准是为了重写ECU内部软件中的参数,而从主结点发送指定XCP地址的命令和重写数据的命令,从结点会对应的导出适当的参数地址、执行重写,并返回一个应答。图18显示了,根据XCP主结点发送的XCP扩张地址“0”、XCP地址“0x0041D5C8”,将该地址开始的2字节的参数,重写为“0x0064”的示例的跟踪结果。

其它的XCP功能
到这里,已经详细解释了XCP协议通信的机制和功能。接下来将介绍“XCP趋势和应用实例”。
上一章:测量/校准协议是什么?
版权声明:
本文来源网络,所有图片文章版权属于原作者,如有侵权,联系删除。
本文网址:https://www.mushiming.com/mjsbk/5807.html