
摘要:本文介绍了USB设备驱动相关的基本知识结构,和编写驱动的基本步骤和流程。最后通过编写一个USB鼠标的驱动实力,讲述了简单字符型USB输入设备驱动的具体编写步骤,并给予了测试方法。文末附有完整程序代码和Makefile。
- 本文环境:
- JZ2440V3开发板
- Linux3.4.2内核
- arm-linux-gcc4.3.2编译器
- 参考资料:
- 2_USB驱动程序之USB总线驱动程序 (100ask.net)
- 19.Linux-USB总线驱动分析 - 诺谦 - 博客园 (cnblogs.com)
- LDD3
- 为什么一插上就会有提示信息?
是因为windows自带了USB总线驱动程序;
- 那USB总线驱动程序是干嘛用的?
- 识别USB设备;
- 给USB设备找到并安装对应的驱动程序;
- 提供USB的读写函数。
首先,新接入的USB设备的默认地址(编号)为0,再未分配新编号前,PC主机使用0地址和它通信。然后USB总线驱动程序都会给它分配一个地址(编号)。PC机想访问USB总线上某个USB设备时,发出的命令都含有对应的地址(编号)。
- USB的结构是怎样的?
- USB是一种主从结构。主机叫做Host,从机叫做Device,所有的USB传输,都是从USB主机这方发起;USB设备没有“主动”通知USB主机的能力。
- 例如:USB鼠标滑动一下立刻产生数据,但是它还没有能力通过OC机来读数据,只能被动地等待PC机来读。
- USB可以热拔插的硬件原理
- 在USB集线器(hub)的每个下游端口的D+和D-上,分别接了一个15K欧姆的下拉电阻到地。这样,在集线器的端口悬空时,就被这两个下拉电阻拉到了低电平。
- 而在USB设备端,在D+或者D-上接了1.5k欧姆上拉电阻,对于全速和高速设备,上拉电阻是接在D+上;而低速设备则是上拉电阻接在D-上。
- 这样,当设备插入到集线器时,由1.5k的上拉电阻和15k的下拉电阻分呀,结果就将差分数据线中的一条拉高了。集线器检测到这个状态后,它就报告给USB主控制器(或者通过它上一层的集线器报告给USB主控制器),这样就检测到设备的插入了。
- USB高速设备先是被识别为全速设备,然后通过HOST和DEVICE两者之间的确认,再切换到告诉模式的。在高速模式下,是电流传输模式,这时将D+上的上拉电阻断开。
- USB的4大传输类型:
- 控制传输
- 是每一个USB设备必须支持的,通常用来获取设备描述符、设置设备的状态等等。一个USB设备从插入到最后的拔出这个过程一定会产生控制传输(即便这个USB设备不能被这个系统支持)。
- 中断传输
- 支持中断传输的典型设备有USB鼠标、USB键盘等等。中断传输不是说我的设备真正发出一个中断,然后主机会来读取数据。它其实是一种轮询的方式来完成数据的通信。USB设备会在设备驱动程序中设置一个参数叫做interval,它是endpoint的一个成员。interval是间隔时间的意思,表示我这个设备希望主机多长时间来轮询自己,只要这个值确定了之后,我主机就会周期性来查看有没有数据需要处理。
- 批量处理
- 支持批量传输最典型的设备就是U盘,它进行大数量的数据传输,能够保证数据的准确性,但是时间不是固定的。
- 实时传输
- USB摄像头就是实时传输设备的典型代表,它同样进行大量数据的传输,数据的准确性无法保证,但是对传输延迟非常敏感,也就是说对实时性要求比较高
- 控制传输
- USB端点:
- 每个USB设备与主机会有若干个通信的“端点”。每个端点都有个端点号,除了端点0外,每一个端点只能工作在一种传输类型(控制传输、中断传输、批量传输、实时传输)下,一个传输方向。
- 传输方向都是基于USB主机的立场说的,比如:鼠标的数据是从鼠标传到PC机,对应的端点称为“中断输入端点”。
- 端点0是设备的默认控制端点,既能输出也能输入,主要用于USB设备的识别过程。
- USB主机控制器类型
要想成为一个USB主机,硬件上就必须要有USB主机控制器,USB主机控制器又分为4种接口:
- OHCI(Open Host Controller Inerface):微软主导的低速USB1.0(1.5Mbps)和全速USB1.1(12Mbps),OHCI接口的硬件简单,软件复杂。
- UHCI(Universal Host Controller Interface):Intel主导的低速USB1.0(1.5Mbps)和全速USB1.1(12Mbps),而UHCI接口的软件简单,硬件复杂。
- EHCI(Enhace Host Controller Interface):高速USB2.0(480Mbps)。
- xHCI(eXtensible Host Controller Interface):USB3.0(5.0Gbps),采用了9针脚设针,同时也支持USB2.0、1.1等。
- USB驱动整体框架:
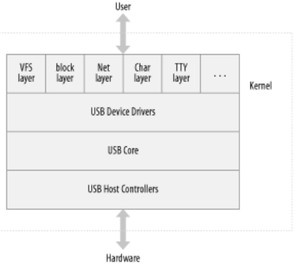
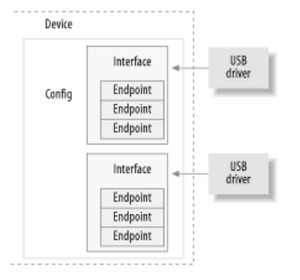
一个 USB 设备是一个非常复杂的事物, 如同在官方的 USB 文档(可从 http://www.usb.org 中得到)中描述的. 幸运的是, Linux 提供了一个子系统 称为 USB 核, 来处理大部分复杂的工作. 《图USB设备驱动框架》 显示了 USB 设备如何包含配置、接口和端点,,以及 USB 驱动如何绑定到 USB 接口, 而不是整个 USB 设备.
- 端点:它是USB 通讯的最基本形式,且是一个单向通讯管道,要么从主机到设备(称为输出端点),要么从设备到主机(称为输入端 点)。
- 端点类型 :一个USB 端点可是 4 种不同类型的一种, 它来描述数据如何被传送。
- CONTROL(控制端点):通常用作配置、 获取USB设备的信息或状态. 每个 USB 设备都有一个被称"端点0"的控制端点, 它被 USB 核用来在USB设备插入时配置设备。
- INTERRUPT(中断端点):在每次 USB 主机请求设备数据时, 以固定的速率传送小量的数据。例如鼠标、键盘等就是使用该类型。
- BULK(块端点) :一般用于需要传送不能有任何数据丢失的大量数据的设备,例如打印机、存储器和网络设备等。
- ISOCHRONOUS (同步端点):一般用于需要传送可以有部分数据丢失的大量数据的设备,例如音视频实时数据收集设备等。
- 控制和块端点采用异步数据传送,USB 协议保证前者数据传送的实时性,而后者不保证。
- 中断和同步端点是周期性的(在固定的时间内连续传送数据),USB 协议保证前者数据传送的实时性,而后者不保证。
- 端点类型 :一个USB 端点可是 4 种不同类型的一种, 它来描述数据如何被传送。
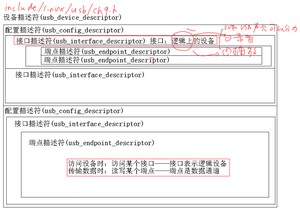
- USB设备描述符(usb_device_descriptor)
- USB配置描述符(usb_config_descriptor)
- USB接口描述符(usb_interface_descriptor)
- USB端点描述符(usb_endpoint_descriptor)
- USB接口描述符(usb_interface_descriptor)
- USB配置描述符(usb_config_descriptor)
一个设备描述符可以有多个配置描述符;
一个配置描述符可以有多个接口描述符(比如声卡驱动就有两个接口:录音接口和播放接口)
一个接口描述符可以有多个端点描述符;
2.1.1 USB设备描述符(usb_device_descriptor)
USB设备描述符结构体如下所示:
- usb_device结构体如下所示:
2.1.2 USB配置描述符
一个 USB 设备可有多个配置并且可能在它们 之间转换以便改变设备的状态,但 一个配置只能在一个时间点上被使能。linux使用结构 描述 USB 配置,USB 设备驱动通常不会需要读写这些结构。
2.1.3 接口描述符(逻辑设备)
USB接口只处理一种USB逻辑连接。一个USB接口代表一个逻辑上的设备,比如声卡驱动就有两个接口:录音接口和播放接口。这可以在windows系统中看出,有时插入一个USB设备后,系统会识别出多个设备,并安装相应多个的驱动。
它位于usb_interface->cur_altsetting->desc 这个成员结构体里,
- usb_interface结构体如下所示:
- altsetting:指向一个包含所有可用于该接口的可选设置的结构数组。每个 struct usb_host_interface 包含一套端点配置(即struct usb_host_endpoint结构所定义的端点配置)。这些接口结构没有特别的顺序。
- num_altsetting:由 altsetting 指针指向的预设置的数量。
- cur_altsetting:指向数组 altsetting 的一个指针, 表示这个接口当前被激活的设置.
- minor :如果绑定到这个接口的 USB 驱动使用 USB 主设备号, 这个变量包含由 USB 核心分配给接口的次设备号. 这只在一个成功的调用 usb_register_dev后才有效。
- …:编写驱动不需要关心的其他成员
- 结构体的定义如下:
- 一个 USB 设备驱动通常需要从给定的 struct usb_interface 结构得到 struct usb_device 结构,为此,linux提供有函数来完成此目的。
2.1.4 端点描述符
- USB 端点在内核中使用结构 来描述,但真实的端点信息(所有的USB设备特定的数据)却保存在该结构体指向的称为 中。
- bEndpointAddress:端点地址,其中一位反映了端口方向,可利用位掩码 USB_DIR_OUT 或 USB_DIR_IN获知。
- bmAttributes :端点类型。可利用位掩码 与其相与来判断端点是 , 或中的一种。
- wMaxPacketSize :这个端点可一次处理的最大字节数。当真正进行数据传输时时,如果驱动传送比这个值大的数据时, 数据会被分成若干个大小为 wMaxPakcetSize 的块. 对于高速设备, 这个成员可用来支持高带宽模式,即通过在这个值的高位部分使用几个额外位( 细节见 USB 规范)。
- bInterval :如果这个端点是中断类型的, 这个值是为这个端点设置的间隔(单位毫秒)。
- endpoint的结构体为,如下所示:
- 假设端点0就位于
};
- 所有的 USB 特定信息可直接从 sysfs 获得(例如, idVendor, idProduct, 和 bMaxPower 信息)
- 可写文件bConfigrationValue,可被改写以改变激活的正被使用的 USB 配置。
- sysfs只显示USB接口层面的信息,任何USB设备可能的配置及其端点信息可在 usbfs 文件系统中找到,其在内核中的目录为。
- usbfs 文件系统允许在用户空间直接操作它里面的USB设备,所以使许多内核驱动被可以移出到易维护和调试的用户空间。例如USB 扫描器驱动就在包含在用户空间的 SANE 库程序中
- linux 内核中的 USB核和所有的 USB 设备使用请求块( USB request block)进行通讯,这个请求块用 结构描述并且可在 中找到。
- 一个 urb 用来从一个特定 USB 设备上的特定的 USB 端 点, 以一种异步的方式发送或接受数据。它非常像被用在文件系统异步 I/O 代码中的 结构,或用在网络代码中的结构。
- 根据驱动的需要,一个 USB 设备驱动可能分配多个 urb 给一个端点,或者可能重用单个 urb 给多个不同的端点。设备中的每个端点都维护一个 urb 队列,多个 urb 可被发送到相同的端点。
- 一个 urb 的典型生命循环如下:
- 被一个 USB 设备驱动创建.
- 安排给一个特定 USB 设备的特定端点.
- 被 USB 设备驱动提交给 USB 核心 .
- 被 USB 核心指定的 USB 主机控制器驱动提交给特定设备 .
- 被 USB 主机控制器处理, 它做一个 USB 传送到设备.
- USB 主机控制器驱动通知 USB 设备驱动本次 urb 完成.
- 提交 urb 的驱动可在任何时间取消提交, USB 核心也可在设备被拔出时取消它提交的urb。
- urb 被动态创建并且包含一个内部引用计数,只有计数值为0时才会释放该urb。
- urb 的使用主要是为了获得最高可能的数据传送速度,但若没有速度要求,例如只是想发送单独的块或者控制消息, 并且不关心数据吞吐率时,就不必使用urb了。也就是说USB传送可以不用urb。
2.3.1 urb 结构中和 USB 设备驱动有关的成员
- :指向 urb 要发送到的USB设备。在 urb 被发送到 USB 核之前,它必须 被 USB 驱动初始化。
- :指向 urb 要发送到的USB设备的端点。在 urb 被发送到 USB 核之前,它必须 被 USB 驱动初始化。
- 为了便于初始化上述两个变量,linux内核提供了如下初始化函数:
- :根据 USB 驱动想这个 urb 发生什 么,这个变量可被设置为以下不同的位值:
- URB_SHORT_NOT_OK:当置位, 它指出任何在某IN端点上可能发生的短读, 应当被 USB 核 心当作一个错误。这个值只对从 USB 设备读的 urb 有用, 不是写 urbs。
- URB_ISO_ASAP :对于同步 urb, 只要设置了该位,如果驱动想调度这个 urb,只要带宽允许,且在此点设置这个 urb 中的 start_frame 变 量即可;如果这个位没有被置位,如果没有在那个时刻启动,驱动必须指定 start_frame 值并且必须能够正确恢复。
- URB_NO_TRANSFER_DMA_MAP :当 urb 包含一个要被发送的 DMA 缓冲时,应当被置位。此时USB 核心使用这 个被 transfer_dma 变量指向的缓冲, 不是被 transfer_buffer 变量指向的缓冲.
- URB_NO_SETUP_DMA_MAP :当 urb 已经建立了一个 DMA 缓冲时,如果它被置位, USB 核心使用这个被 setup_dma 变量而 不是 setup_packet 变量指向的缓冲.
- URB_ASYNC_UNLINK:如果置位, 对 usb_unlink_urb 的调用几乎立刻返回, 并 且这个 urb 在后面被解除连接. 否则, 这个函数等待直到 urb 完全被 去链并且在返回前结束. 小心使用这个位, 因为它可有非常难于调试的 同步问题.
- URB_NO_FSBR:只有 UHCI USB 主机控制器驱动使用, 并且告诉它不要试图做 Front Side Bus Reclamation 逻辑. 这个位通常应当不设置。
- URB_ZERO_PACKET:如果置位,当数据需要对齐到一个端点报文边界时,一个块 OUT urb 可以通过发送不包含数据的短报文而结束。
- URB_NO_INTERRUPT:如果置位, 当 urb 结束时硬件可能不产生一个中断。这个位只在多个排队到相同端点的 urb 时使用,USB 核心函数使用这个 为了做 DMA 缓冲传送。
- :指向用在发送数据到设备(对一个 OUT urb)或者从设备中获取数据(对于 一个 IN urb)的缓冲的指针. 对主机控制器而言,这个缓冲必须使用kmalloc 来创建, 而不是在栈或者静态分配。对控制端点, 这个缓冲是给发送的数据阶段。
- :用来使用 DMA 传送数据到 USB 设备的缓冲。
- :缓冲区(transfer_buffer 或者 transfer_dma)的长度。0表示没有传送缓冲被 USB 核使用。对于一个 OUT 端点而言,在一个 urb 中提交一个大块数据(大于端点一次可传送的最大数据量),使 USB 主机控制器去划分为更小的块去传送,比以连续的顺序发送小的缓冲块要快。
- :指向给一个控制 urb 的 setup 报文的指针. 它在位于传送缓冲中的数 据之前被传送. 这个变量只对控制 urb 有效.
- :给控制 urb 的 setupt 报文的 DMA 缓冲. 在位于正常传送缓冲的数据 之前被传送. 这个变量只对控制 urb 有效.
- :当一个 urb 被完全传送或者当 urb 发生一个错误时, USB 核心调用该变量指向的完成处理者函数(类似于回调函数),在这个函数中, USB 驱动可检查这个 urb, 要么释放它, 要么重新提交另一次传送给它。
- :指向数据点的指针, 它可被 USB 驱动设置。当 urb 返回到驱动时,它可在完成处理者中使用。
- :当urb 被完成时, 这个变量被设置为已传送数据的真实长度。特别对于 IN urb, 这个必须被用来替代 transfer_buffer_length 变量, 因为接收的数据可能比缓冲区小.
- :urb 的当前状态。 USB 驱动可在 urb 完成后调用处理者函数中安全的存取该值。对于同步 urb, 状态成功(0)只代表这个 urb 是否已被去链. 为获得同步 urb 的详细状态, 应当检查 iso_frame_desc 变量。status的值包含以下可能的取值:
- 0: urb 传送成功;
- -ENOENT:这个 urb 被对 usb_kill_urb 的调用停止;
- -ECONNRESET:urb 被对 usb_unlink_urb 的调用去链, 并且 transfer_flags 变量被 设置为 URB_ASYNC_UNLINK;
- -EINPROGRESS :这个 urb 仍然在被 USB 主机控制器处理中;
- -EPROTO:一个 bitstuff 错误在传送中发生,或者硬件没有及时收到响应帧。
- -EILSEQ:这个 urb 传送中有一个 CRC 不匹配;
- -EPIPE:这个端点现在被停止. 如果这个包含的端点不是一个控制端点, 这个错 误可被清除通过一个对函数 usb_clear_halt 的调用.
- -ECOMM :在传送中数据接收快于能被写入系统内存. 这个错误值只对 IN urb.
- -ENOSR :在传送中数据不能及时从系统内存中获取, 以便可跟上请求的 USB 数据速率. 这个错误只对 OUT urb.
- -EOVERFLOW : 这个 urb 发生一个"babble"错误.(端点接受的数据多于端点的特定最大报文大小).
- -EREMOTEIO :只发生在当 URB_SHORT_NOT_OK 标志被设置在 urb 的 transfer_flags 变量, 并且意味着 urb 请求的完整数量的数据没有收到.
- -ENODEV :系统中没有这个 USB 设备(设备被拔出).
- -EXDEV :只对同步 urb 发生, 并且意味着传送只部分完成. 为了决定传送什么, 驱动必须看单独的帧状态.
- -EINVAL :这个 urb 发生了非常坏的事情. 例如一个参数在 urb 结构中被不正确地设置了, 或者如果 在提交这个 urb 给 USB 核心的 usb_submit_urb 调用中, 有一个不正 确的函数参数.
- -ESHUTDOWN:这个 urb 被提交给的设备已掉线
通常, 错误值 -EPROTO, -EILSEQ, 和 -EOVERFLOW 指示设备的硬件问题。
- :设置或返回同步传送要使用的初始帧号.
- : urb被轮询的间隔,这只对中断或者同步 urb 有效。这个值的单位依据设备速度而不同,对于低速和高速的设备, 单位是帧(等同于毫秒),对于单位是宏帧的设备, 它等同于 1/8 微秒。 在这个 urb 被发送到 USB 核心之 前,这个值必须先被 USB 驱动设置给同步或者中断 urb。
- :只对同步 urb 有效, 并且指定这个 urb 要处理的同步传送缓冲的编号. 在这个 urb 发送给 USB 核心之前,这个值必须先被 USB 驱动设置给同步 urb。
- :在同步 urb 完成之后,被 USB 核心设置。它指定同步传送发生的错误次数.
- :只对同步 urb 有效. 这个变量是组成这个 urb 的一个 struct usb_iso_packet_descriptor 结构数组. 这个结构允许单个 urb 来一次 定义多个同步传送. 它也用来收集每个单独传送的传送状态. 结构 usb_iso_packet_descriptor 由下列成员组成:
- unsigned int offset :报文数据所在的传送缓冲中的偏移(第一个字节从 0 开始).
- unsigned int length :这个报文的传送缓冲的长度.
- unsigned int actual_length :接收到给这个同步报文的传送缓冲的数据长度.
- unsigned int status :这个报文的单独同步传送的状态. 它可采用同样的返回值如同主 struct urb 结构的状态变量.
2.3.2 urb的创建和销毁
- 为了不破坏 USB 核心用于统计 urb 引用计数的函数,struct urb 结构在驱动中必须使用kmalloc动态创建。为此,Linux内核专门提供了分配和回收函数:
-
- iso_packet:这个 urb 包含的同步报文的数目。若是非同步urb,取值为0.
- mem_flags:传递给 kmalloc 函数调用来从内核分配内存的相同的标志类型。
-
- urb:被释放的 struct urb 的指针。
-
- 在 urb 被成功分配后, 一个 DMA 缓冲也应当被创建
2.3.3 urb的初始化
- 初始化为中断urb
- struct urb *urb :指向要被初始化的 urb 的指针.
- struct usb_device *dev: 这个 urb 要发送到的 USB 设备.
- unsigned int pipe: 这个 urb 要被发送到的 USB 设备的特定端点. 使用前面提过的 或者 函数创建.
- void *transfer_buffer: 指向缓冲的指针. 注意这必须使用 kmalloc 调用来创建缓冲,而不能是一个静态的缓冲.
- int buffer_length: 被 transfer_buffer 指针指向的缓冲的长度.
- usb_complete_t complete: 指向当这个 urb 完成时被调用的"完成处理函数".
- void *context: 指向数据块的指针, 为以后被完成处理者函数获取.
- int interval: 这个 urb 应当被调度的间隔(注意这个值的正确单位).
- 初始化为块urb
- 参数涵义同中断urb,因为bulk urb没有间隔值,故没有interval参数;
- pipe 变量必须用 usb_sndbulkpipe 或者 usb_rcvbulkpipe 函数的调用初始化;
由于以上函数都不设置 urb 中的 transfer_flags 变量, 因此任何对这个成员的修改不得不由驱动自己完成
- 初始化为控制urb
- 大部分参数涵义同块urb,除了unsigned char *setup_packet,它必须指向要发送给端点的 setup 报文数据。
- pipe 变量必须用 usb_sndctrlpipe 或者 usb_rcvictrlpipe 函数的调用初始化。
- 大部分驱动不使用这个函数, 因为不用 urb同步 API 调用更简单。
- 初始化为同步urb
- 同步 urb 没有像中断, 控制, 和块 urb 那样的初始化函数,在被提交给 USB 核心之前,必须在驱动中"手动"初始化。下面是一 个如何正确初始化这类 urb 的例子:
2.3.4 urb的提交
一旦 urb 被正确地创建,并且被 USB 驱动初始化, 它已准备好被提交给 USB 核心来发送出到 USB 设备。以下函数完成该功能:
- urb:被提交的urb指针
- mem_flags:告诉 USB 核心如何分配内存缓冲,等同于传递给 kmalloc 调用的同样的参数;因为函数 usb_submit_urb 可被在任何时候被调用(包括从一个中断上下文), mem_flags 变量的指定必须正确,他有以下取值:
- :只要满足以下任一条件,就需要使用该宏
- 调用者处于一个 urb 完成处理者函数, 一个中断, 一个中断后半部, 一个tasklet, 或者一个时钟回调函数中。
- 调用者持有一个自旋锁或者读写锁;
- current->state 不是 TASK_RUNNING;
- :如果驱动在块 I/O 补丁中或所有存储类型的错误处理补丁中。
- :当用在所有其他的情况中。
- :只要满足以下任一条件,就需要使用该宏
2.3.5 urb的回调函数
当 urb 符合以下任一情况时,在初始化时指定的回调函数complete将被调用一次:
- urb 被成功发送给设备, 并且设备返回正确的确认信号。此时urb的状态变量被设置为0
- urb在数据传送中连续发生错误,urb传送被系统停止,urb的状态变量被设置为对应的错误值
- urb 被从 USB 核心去链(驱动通过调用 usb_unlink_urb 或者 usb_kill_urb函数取消一个已提交的urb,或者urb将要被传送到的设备已从系统中被去除)。
-
- 回调函数做的第一件事是检查 urb 的状态来决定这个 urb 是否成功完成。注意:错误值, -ENOENT, -ECONNRESET, 和 -ESHUTDOWN 不是真正的传送错误, 只是报告伴随成功传送的情况.
- 接着这个回调释放安排给这个 urb 传送的已分配的缓冲.
- 注意,urb 回调是在中断上下文运行, 因此它不应当做任何内存分配, 持有任何锁, 或者任何可导致进程睡眠的事情。
- 当需要从回调中提交 urb, 使用 GFP_ATOMIC 标志来告知 USB 核心不要睡眠。
- 一个回调函数的例子:
2.3.6 urb的取消
当需要停止一个已经提交给 USB 核心的 urb时,可采用以下函数:
- ——常用在urb要送达的设备从系统被去除时使用,常用在去连接的回调函数中。
- ——该函数是非阻塞的,可用在中断处理或者持有一个自旋锁时停止 urb,但这个函数要求urb的 URB_ASYNC_UNLINK 标志值被设置。
当需要进行大量数据传送时,选择urb是对的。但若仅是传送一些简单的数据,我们有一些方便的函数可以达到此目的,而不必创建繁琐的urb。
2.4.1 usb_bulk_msg
- 该函数自动创建一个 USB 块 urb 并且发送它到特定的设备, 等待发送完成后返回到调用者。
- usb_dev:指向发往的 USB 设备;
- pipe:要发送到的 USB 设备的特定端点,使用 或者 函数创建pipe的值。
- data:指向要发往设备的数据的指针或者是存储接收来自设备的数据的缓存区地址
- len:data 参数指向的缓冲的长度
- actual_length:指向函数放置真实字节数的指针
- timeout:等待超时时间(滴答数),若为0,则永远等待直至消息传输结束。
- 返回值:成功返回0,且actual_length 参数包含被传送 或从消息中获取的字节数,否则返回负值错误码。
- 应用举例:
- 注意事项:
- 不能从中断上下文中或者在持有自旋锁期间调用usb_bulk_msg,因为该函数会导致睡眠。
- 函数不能被任何其他函数取消;
- 要确认驱动的disconnect函数能预留足够多的时间(在它自己被卸载之前)去等待该函数的完成。
2.4.2 usb_control_msg
- 除了允许驱动发送结束 USB 控制信息外,它和usb_bulk_msg功能一样。
- dev:指向发往的 USB 设备;
- pipe:要发送到的 USB 设备的特定端点;
- request:控制消息的 USB 请求值;
- requesttype:控制消息的 USB 请求类型;
- value:控制消息的 USB 消息值;
- index:控制消息的 USB 消息索引值;以上4个参数见USB规范第9章。
- data:指向要发往设备的数据的指针或者是存储接收来自设备的数据的缓存区地址;
- size:data 参数指向的缓冲的大小;
- timeout:等待超时时间(滴答数),若为0,则永远等待直至消息传输结束。
- 返回值:成功,返回被传送 或从消息中获取的字节数,否则返回负值错误码。
- 注意事项:
- 不能从中断上下文中或者在持有自旋锁期间调用usb_bulk_msg,因为该函数会导致睡眠。
- 函数不能被任何其他函数取消;
- 要确认驱动的disconnect函数能预留足够多的时间(在它自己被卸载之前)去等待该函数的完成。
2.4.3 USB设备信息获取函数
- 前提条件:这些函 数不能从中断上下文或者持有自旋锁时调用.
- 当USB 驱动想从usb_device 结构中, 获取任何还没有在 usb_device 和 usb_interface 结构中出现的设备描述符时,可调用以下函数:
-
- type :描述符类型,取值是下列类型之一
- index:希望从设备获取的描述符的数目;
- buf:存储描述符信息的缓冲区指针;
- size:由 buf 变量指向的内存的大小
- usb_get_descripter 调用的一项最普遍的用法是从 USB 设备获取一个字符串,所以linux又专门为这个功能提供了两个函数:
- :
- 成功时返回字符串字节数,失败时返回负值错误码;
- 成功时,buf将会收到一个以 UTF-16LE 格式编码的字符串(Unicode, 16 位每字符, 小端字节序)
- :
- 参数同上,其中langid是结构体usb_device_descriptor中的某一项
- 但它buf中存放的是一个已经转化为 ISO 8859-1格式编码的字符串,而该格式是USB设备的字符串典型格式。
- 使用举例:
- :
- 所有 USB 驱动必须创建的主要结构是 struct usb_driver. 这个结构必须被 USB 驱动填充,通常只有 5 个成员需要被初始化:
- :指向这个驱动的模块拥有者,USB 核心使用它正确地对这 个 USB 驱动进行引用计数。一般设置为THIS_MODULE宏.
- :指向驱动名。它在内核 USB 驱动中必须是唯一的,并且通常和驱动的模块名相同。当驱动被加载到内核中时,它出现在/sys/bus/usb/drivers/ 之下。
- :包含这个驱动可接受的所有不同类型 USB 设备的列表. 如果这个变量没被设置, USB 驱动中的probe函数不会被调用。如果你想你的驱动可被系统中每个 USB 设备调用, 你只需创建一个只设置了 driver_info 成员的入口项:
- :指向 USB 驱动中的探测函数,当USB核心发现系统中有一个USB设备(struct usb_interface)可被该驱动驱动时,它将调用probe指向的函数。成功返回0,失败返回负值错误码。
- :指向去连接函数。当 struct usb_interface 已被从系统中清除或者当驱动被从 USB 核心卸载时调用。
- 除了以上5个成员外,还有以下几个不常用的成员项:
- :只有 USB 集线器驱动使用这个 ioctl,在用户空间对一个关联到 USB 设备的usbfs文件系统做IO系统调用时,会触发该iocctl被调用。
- : 当设备要被 USB 核心悬挂时被调 用
- :当设备正被 USB 核心恢复时被调 用。
- 一般在 USB 驱动的模块初始化代码中注册 struct usb_driver 到 USB 核心,使用的函数模板为:
- 一般在 USB 驱动的模块卸载代码中将 struct usb_driver 从USB 核心注销,此后任何当前绑定到这 个驱动的 USB 接口被去连接, 并且去连接函数被调用。使用的函数模板为:
- 在usb_driver结构中,描述了两个USB 核心在合 适的时候调用的函数:
- 探测函数probe:当设备被安装时, USB 核心认为这个驱动可以处理该设备时,便会调用驱动的探测函数,此时,探测函数应当对传递给它的设备信息进行检查, 并且决定驱动是否真正合适那个设备.
- 去连接函数disconnect:当驱动应当不再控制设备时被调用做一些清理工作。
- 需要注意的是,以上2个函数都是在USB 集线器内核线程上下文中被调用,因此它们睡眠是合法的。但是, 为了保持 USB 探测时间为最小,建议大部分工作应当在设备被用户打开时完成。
- 在探测函数回调中, USB 驱动应当初始化任何它将来可能使用来管理 USB 设备的本地结构, 因为在此时做这些通常更容易。例如,驱动经常需要获取USB设备的端点地址和缓冲大小等信息。一个探测 BULK 类型的 IN 和 OUT 端点, 并且保存一些关于它们的信息在一个本地设备结构的代码块如下:
- 在设备的生命周期后期,USB 驱动需要获取一个和该设备关联的usb_interface数据结构,为此Linux提供了如下函数:
- 该函数接受一个指向任何数据类型的指针,并且保存它到 struct usb_interface 结构,并为后面使用。
- 为了获取上面保存的数据,可以调用如下函数:
- 在 USB 驱动的 open 函数和在去连接函数中,该函数经常被使用。
- 正是因为使用上面两个函数, USB 驱动不需要为系统中所有当前的设备保持一个静态指针数组来保存单个设备结构。这种对设备信息的非直接使得USB驱动支持无限数目的设备。
- 一个使用usb_get_intfdata的例子如下:
- 如果 USB 驱动没有和另一种处理用户和设备交互的子系统(例如 input, tty, video, 等待)关联,,为了使用传统的和用户空间之间的交互,驱动可使用 USB 主设备号来创建一个字符驱动接口。为此, USB 驱动必须在探测函数中调用 usb_register_dev 函 数。
- usb_class_driver包含了许多参数:
- :用来描述设备的名子。用在 devfs 文件系统中。 如果设备号需要显示在名子中, 字符 %d 应当在名子串中。例如要创建usb/foo1 和 sysfs 类名 foo1, 名子串应当设置为 。
- :驱动已定义用来注册为字符设备.
- :若要在 devfs 文件系统中要被创建的模式,否则不使用。这个变量的典型设置是值 S_IRUSR 和 值 S_IWUSR 的结合。
- :驱动的起始次设备号。 只有 16 个设备被允许在任何时刻和这个驱动关联, 除非 CONFIG_USB_DYNAMIC_MINORS 配置选项被打开。此时可忽略这个变量,以后这个设备的所有的次设备号被以先来先服务的方式分配。建议打开了这个选项的系统,使用 udev 来关联系统中的设备节点。
- usb_class_driver包含了许多参数:
- 如果 usb_register_dev 已被在探测函数中调用来分配一个 USB 设备的次设备号,当 USB 设备断开, 所有的关联到这个设备的资源应当被清除(将次设备号返还给 USB 核心),Linux提供了一个函数来完成此任务:
- 当然,在去连接函数中,还需要从接口获取之前调用 usb_set_intfdata 所设置的 数据. 接着设置数据指针在 struct us_interface 结构为 NULL 来阻止在不正 确存取数据中的任何进一步的错误:
- 在 disconnect 函数被调用后,所有的当前在被传送的 urb 可被 USB 核心自动取消, 因此驱动不必明确为这些 urb 调用 usb_kill_urb。若此后驱动还像该设备提交urb时,将返回-EPIPE错误。
- :所有和 USB 相关的头文件. 它必须被所有的 USB 设备驱动包含
- :描述 USB 驱动的结构;
- : 描述这个驱动支持的 USB 设备的结构.
- : 用来从 USB 核心注册和注销一个 USB 驱动的函数.
- : 从 struct usb_interface 获取控制 struct usb_device *.
- :控制完整 USB 设备的结构.
- :主 USB 设备结构, 用来和 USB 核心通讯的所有的 USB 驱动。
- :设置在 struct usb_interface 中的私有数据指针部分的函数.
- :获取在 struct usb_interface 中的私有数据指针部分的函数.
- :描述 USB 驱动的一个结构, 这个驱动要使用 USB 主设备号来和用户空间程序通讯.
- :用来注册一个特定 struct usb_interface * 结构到 struct usb_class_driver 结构的函数.
- :用来注销一个特定 struct usb_interface * 结构到 struct usb_class_driver 结构的函数.
- :描述一个 USB 数据传输的结构.
- :用来创建一个 struct urb*的函数
- :用来销毁一个 struct urb*的函数.
- 用来启动或停止一个 USB 数据传输的函数
- 用来在被提交给 USB 核心之前初始化一个 struct urb 的函数
- 用来发送和接受 USB 数据的函数(不使用 urb).
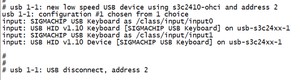
由于内核自带了USB驱动,所以我们先插入一个USB键盘到开发板上看打印信息发现以下字段:
如下图,找到第一段话是位于drivers/usb/core/hub.c的第2186行:

这个hub其实就是我们的USB主机控制器的集线器,用来管理多个USB接口
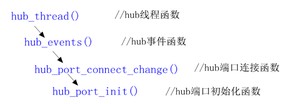
2.8.1 drivers/usb/core/hub.c的第2186行位于hub_port_init()函数里
它又是被谁调用的,如下图所示,我们搜索到它是通过hub_thread()函数调用的
hub_thread()函数如下:
从上面函数中得到, 要想执行hub_events(),都要等待khubd_wait这个中断唤醒才行。
2.8.2 搜索”khubd_wait”,看看是被谁唤醒
找到该中断在kick_khubd()函数中唤醒,代码如下:
2.8.3 继续搜索kick_khubd,发现被hub_irq()函数中调用
显然,就是当USB设备插入后,D+或D-就会被拉高,然后USB主机控制器就会产生一个hub_irq中断.
2.8.4 分析hub_port_connect_change()函数如何连接端口
所以最终流程图如下:

2.8.5 进入hub_port_connect_change()->usb_alloc_dev(),看它是怎么设置usb_device
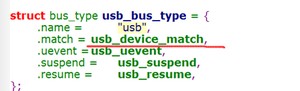
- 在第17行上,设置device成员,主要是用来后面8.2小节,注册usb总线的device表上.
- 其中usb_bus_type是一个全局变量, 它和我们之前学的platform平台总线相似,属于USB总线, 是Linux中bus的一种.
- 如下图所示,每当创建一个USB设备,或者USB设备驱动时,USB总线都会调用match成员来匹配一次,使USB设备和USB设备驱动联系起来.

usb_bus_type结构体如下:
2.8.6 进入hub_port_connect_change()->choose_address(),看它是怎么分配地址编号的
从上面代码中分析到每次的地址编号是连续加的,USB接口最大能接127个设备,我们连续插拔两次USB键盘,也可以看出,如下图所示:

2.8.7 再看hub_port_connect_change()->hub_port_init()函数是如何来实现连接USB设备的
- 上面第6行中,hub_set_address()函数主要是用来告诉USB设备新的地址编号,hub_set_address()函数如下:
- usb_control_msg()函数就是用来让USB主机控制器把一个控制报文发给USB设备,如果传输完成就返回0.其中参数udev表示目标设备;使用的管道为usb_sndaddr0pipe(),也就是默认的地址0加上控制端点号0; USB_REQ_SET_ADDRESS表示命令码,既设置地址; udev->devnum表示要设置目标设备的设备号;允许等待传输完成的时间为5秒,因为USB_CTRL_SET_TIMEOUT定义为5000。
- 上面第12行中,usb_get_device_descriptor()函数主要是获取目标设备描述符前8个字节,为什么先只开始读取8个字节?是因为开始时还不知道对方所支持的信包容量,这8个字节是每个设备都有的,后面再根据设备的数据,通过usb_get_device_descriptor()重读一次目标设备的设备描述结构.
其中USB设备描述符结构体如下所示:
2.8.8 再看hub_port_connect_change()->usb_new_device()函数是如何来创建USB设备的
- 其中usb_get_configuration()函数如下,就是获取各个配置
- 其中device_add ()函数如下
当bus_attach_device()函数匹配成功,就会调用驱动的probe函数
2.8.9 再看usb_bus_type这个的成员usb_device_match函数是如何匹配的
usb_device_match函数如下所示:
显然就是匹配USB驱动的id_table
2.8.10 USB驱动的id_table该如何定义
id_table的结构体为,提供了这个驱动支持的 USB 设备列表。当特定设备被插入系统时,这个列表被 USB 核心用来决定给设备哪个驱动, 并且通过热插拔脚本来 决定哪个驱动自动加载。其定义如下所示:
- 有几个宏可用来初始化这个结构:
- :用来只匹配特定供应商和产品 ID 值.
- :用来在一个版本范围中只匹配特定供 应商和产品 ID 值.
- :用来只匹配一个特定类的 USB 设 备.
- :用来只匹配一个特定类的 USB 接口.
- 对于一个简单的只控制来自一个供应商的单一 USB 设备, struct usb_device_id 表可定义如:
参考/drivers/hid/usbhid/usbmouse.c(内核自带的USB鼠标驱动),看它是如何使用的:
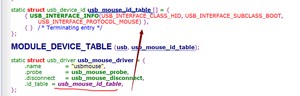
发现,它是通过USB_INTERFACE_INFO()这个宏定义的.该宏如下所示:
然后将上图里的usb_mouse_id_table []里的3个值代入宏USB_INTERFACE_INFO(cl,sc,pr)中:
如下图,我们也可以通过windows上也可以找到鼠标的协议号,也是2:
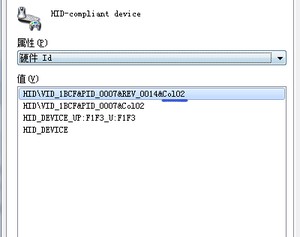
其中VID:表示厂家(vendor)ID
PID:表示产品(Product) ID
总结:当我们插上USB设备时,系统就会获取USB设备的设备、配置、接口、端点的数据并创建新设备,所以我们的驱动就需要写id_table来匹配该USB设备。
讲了这么多,大家一定蒙圈了,现在以一个具体例子来具体分析一个USB驱动的编写方法!
- 预期目标:鼠标左键=按键L,鼠标右键=按键S,鼠标中键=回车键
- .probe函数的结构:
- 1 分配input_dev
- 2 设置
- 3 注册
- 硬件操作
- 使用USB总线驱动函数的读写函数来收发数据
- 怎么写USB设备驱动程序:
- 1 分配/设置usb_driver结构体
- .name
- .id_table
- .probe
- .disconnect
- 2 注册
- 1 分配/设置usb_driver结构体
- 代码编写步骤如下:
0 定义全局变量 :usb_driver结构体、input_dev指针结构体 、虚拟地址缓存区、DMA地址缓存区
1 在入口函数中
- 通过usb_register()函数注册usb_driver结构体
2 在usb_driver的probe函数中
- 分配一个input_dev结构体
- 设置input_dev支持L、S、回车、3个按键事件
- 注册input_dev结构体
- 设置USB数据传输:
->4.1)通过usb_rcvintpipe()创建一个接收中断类型的端点管道pipe,用于端点和数据缓冲区之间的连接
->4.2)通过usb_buffer_alloc()申请USB缓冲区
->4.3)申请并初始化urb结构体(urb:用来传输数据)
->4.4) 因为我们2440支持DMA,所以要告诉urb结构体,使用DMA缓冲区地址
->4.5)使用usb_submit_urb()提交urb
3 在鼠标中断函数中
1)判断缓存区数据是否改变,若改变则上传鼠标事件
2)使用usb_submit_urb()提交urb
4 在usb_driver的disconnect函数中
1)通过usb_kill_urb()杀掉提交到内核中的urb
2)释放urb
3)释放USB缓存区
4注销input_device
5 在出口函数中
1)通过usb_deregister ()函数注销usb_driver结构体
- 该USB设备驱动匹配的是接口描述符中的HID类 & BOOT子类 & MOUSE协议的设备。
- 开始的时候可以仅在该函数中打印一条语句,待整个架构测试通过后再逐步添加 。
USB主机周期性(间隔时间为endpoint->bInterval)的从设备获得数据,并存入到usb buffer中,同时USB主机控制器会向CPU产生中断,并调用usb中断处理函数:
- 开始的时候可以仅在该函数中打印一条语句,待整个架构测试通过后再逐步添加。 。
- 在开发板上接入、拔出USB鼠标,观察串口输出
- 将鼠标当作键盘,依次点击左键(等价于符号l)、右键(等价于符号s)、中键(等价于符号Enter)
- usbmouse_as_key.c
- Makefile文件
版权声明:
本文来源网络,所有图片文章版权属于原作者,如有侵权,联系删除。
本文网址:https://www.mushiming.com/mjsbk/8518.html